Rover
Autonomous mobile robot, picking up anything in its path
Robot Details
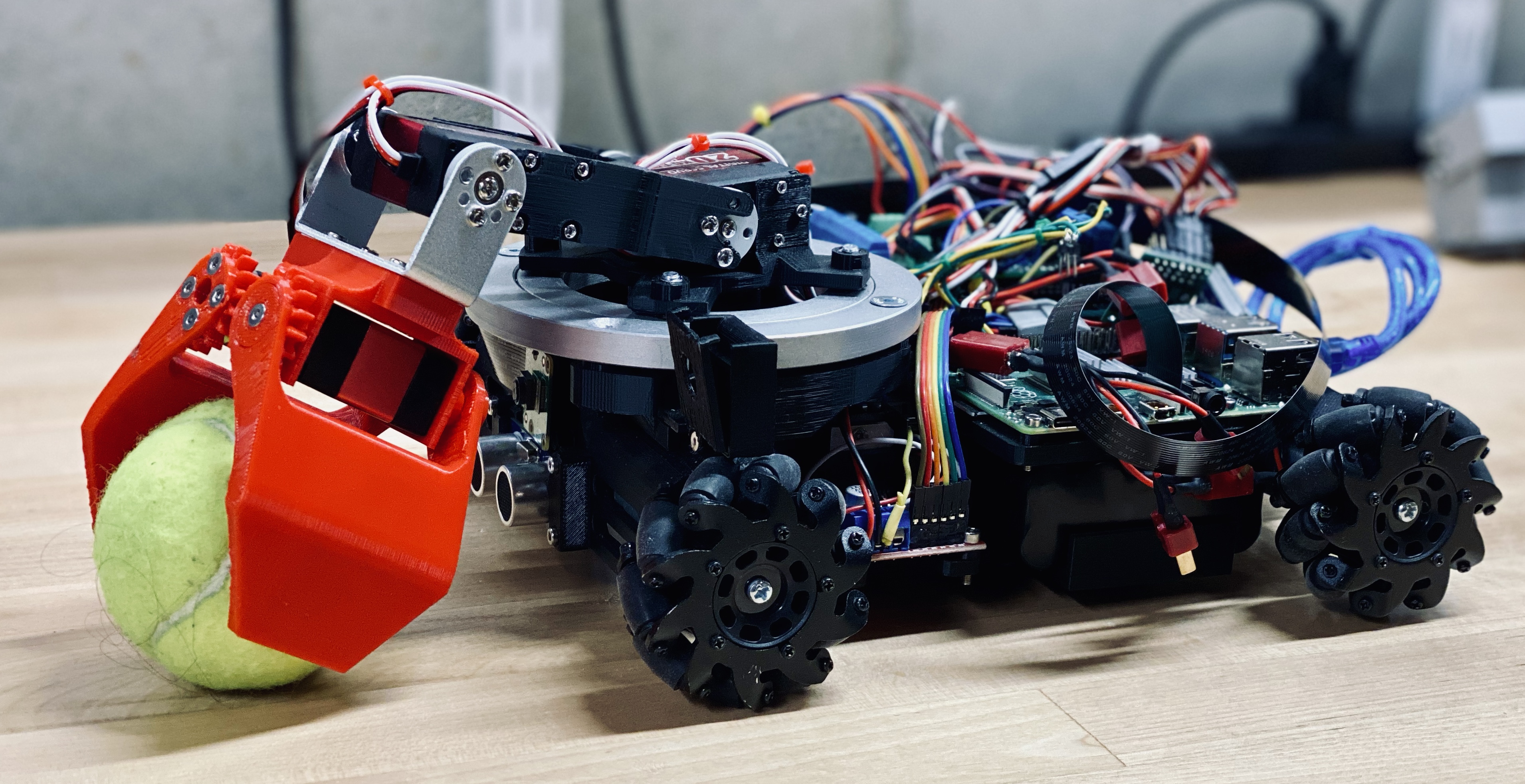
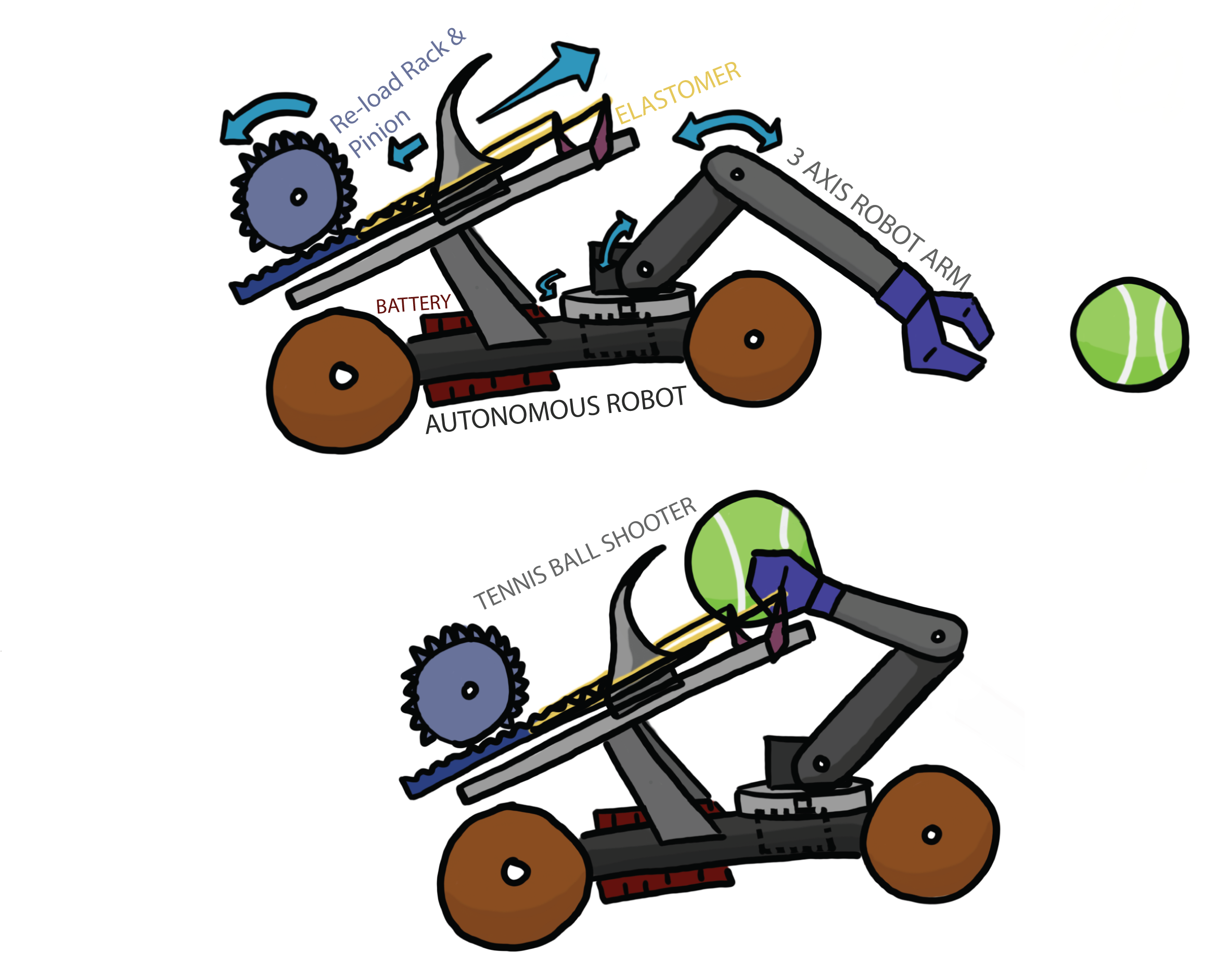
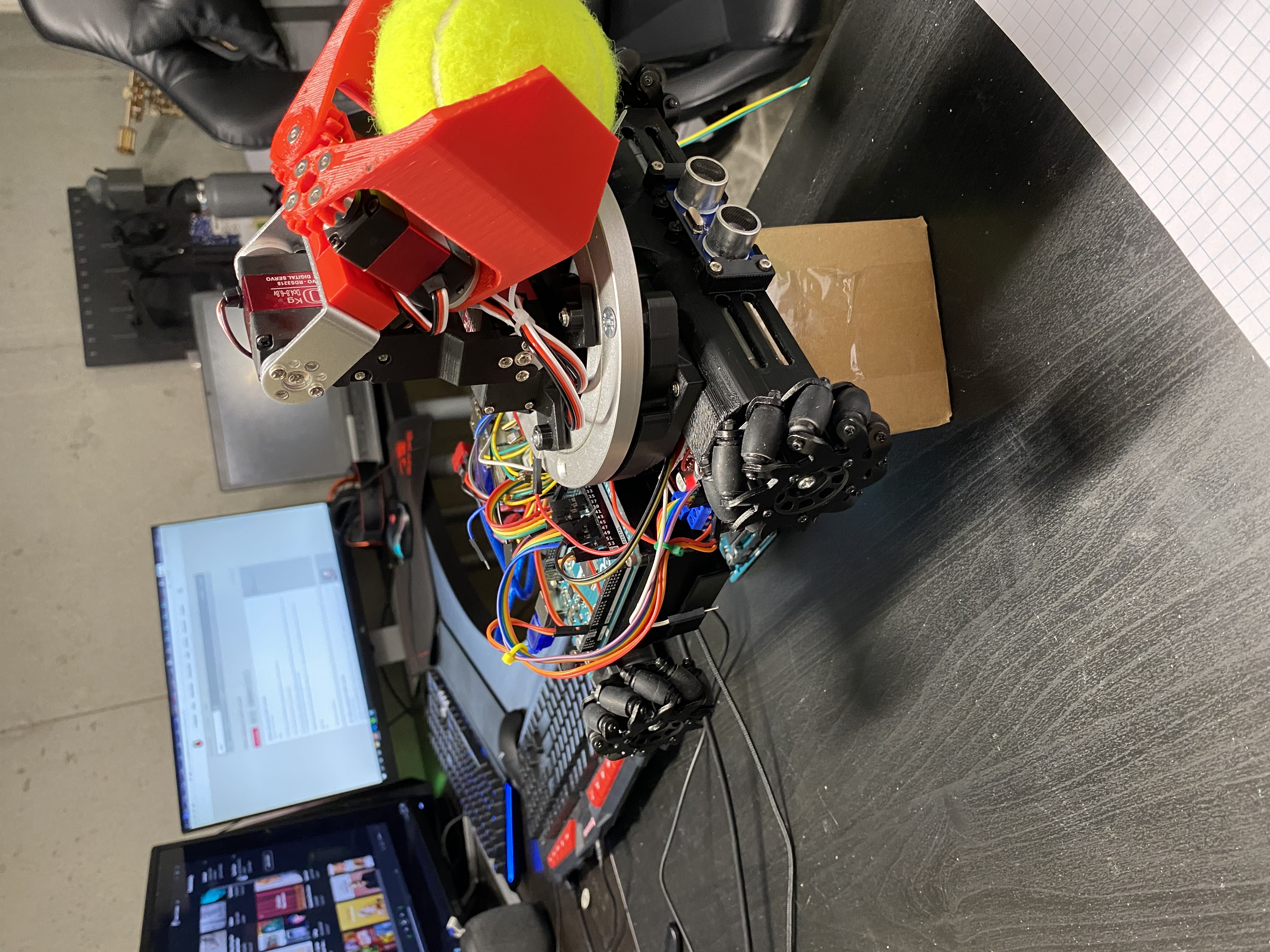
This robot consists of a mobile platform with 4 independent drive motors and a 3 degree-of-freedom robot arm attached to the front. The robot navigates around, avoiding large obstacles, until it finds an object that it is able to pick. It moves towards that object and uses the moutned arm to pick it up. The robot then returns the object to a pre-programmed location such as a basket for dog toys.
Components
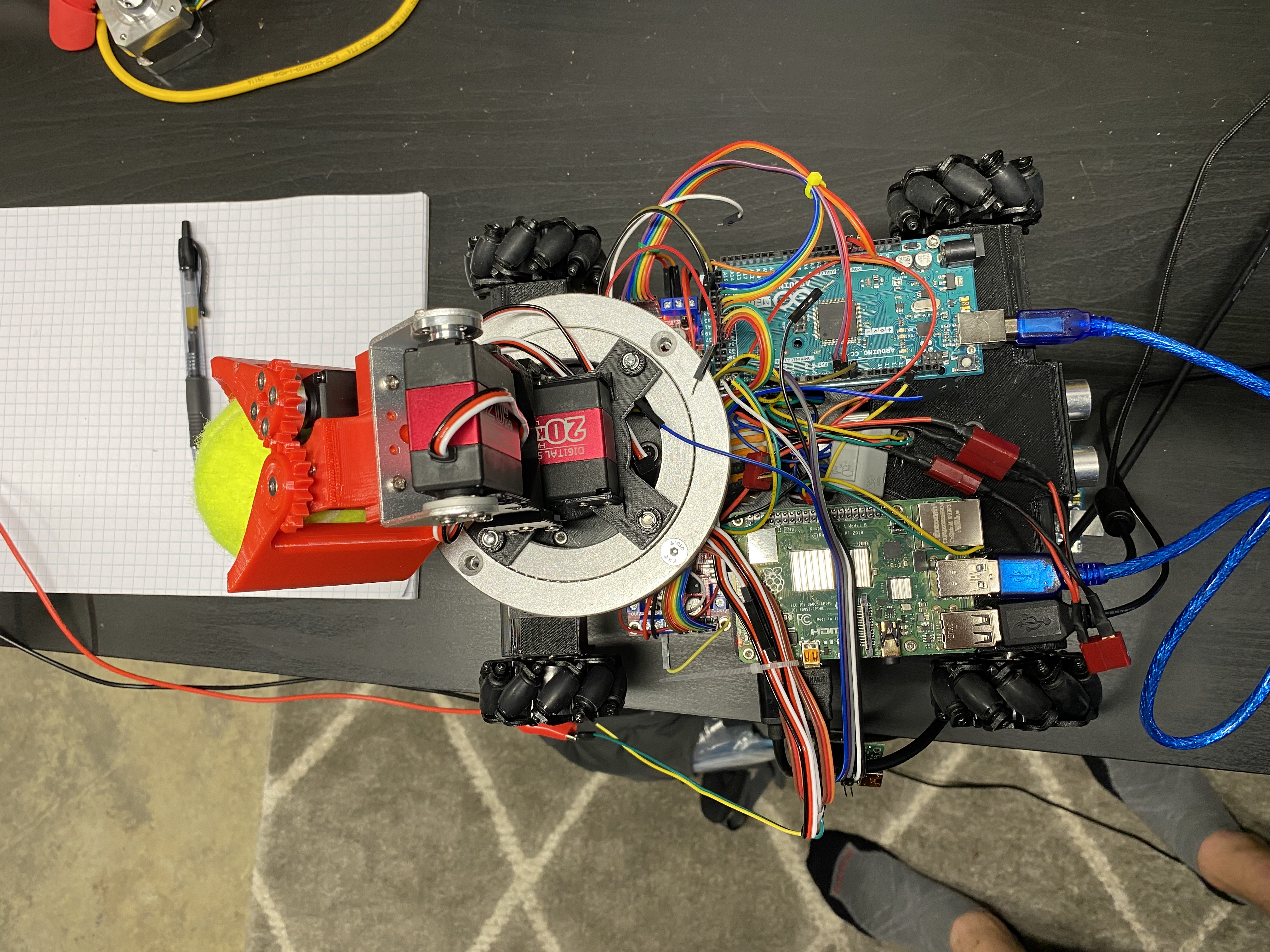
Controls
Sensors
Power and Drive
- 7.4V LiPo Battery Packs
- LiPo Discharge and Charger Board
- Current and Voltage Monitor
- DC Brushed Motor with Encoder
- Mecanum Wheel and Hub Mount
Robot Arm
- Qty 4 20KG Annimos Digial Servos
- Serial Servo Driver Board
- Swash Plate Bearing
Programming
 *Ball finding algorithm to identify and pick up tennis balls in the frame.
*Ball finding algorithm to identify and pick up tennis balls in the frame.